Generative Adversarial Network
Maximum Likelihood Estimation
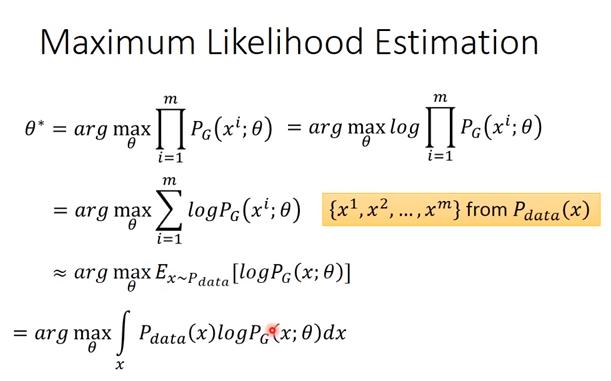
- Given a data distribution
- We have a distribution
- We want to find such that close to
- Sample from
- We can compute
- Likelihood of generating the samples
- Find maximize the likelihood
於是乎
註
- :從 資料中 sample 出一些 x,x被 產生出來的 log likelihood
- :(我認為是)當 x 服從 data 的機率分布時, 產生 x 的 log likelihood
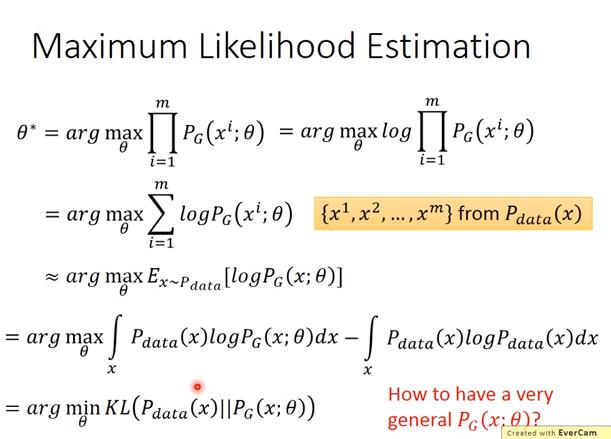
- 總之任務是變成了 minimize 兩個機率分布的 KL divergence
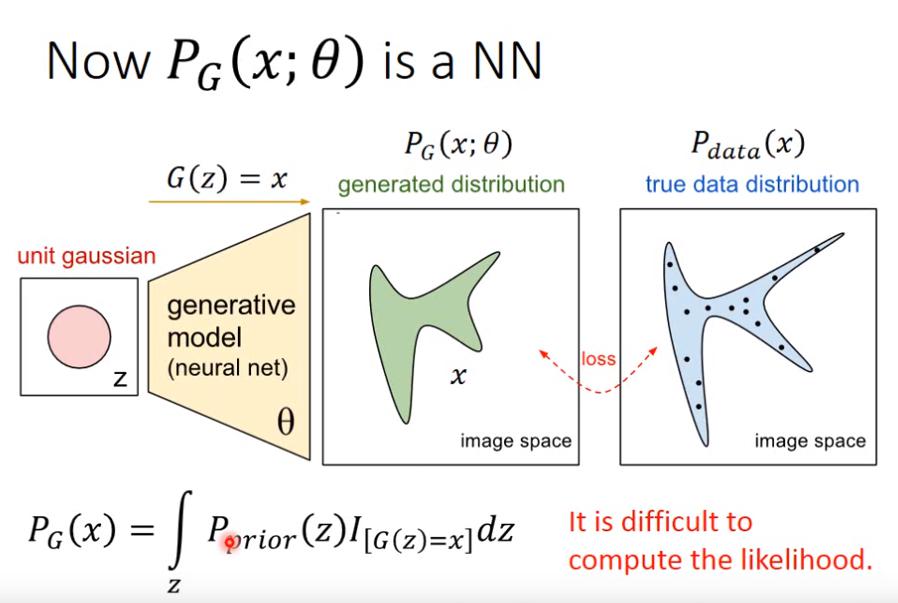
- :從 network 裡面 sample 出 x 的機率
- :每個 z 出現的機率,若G(z)是NN則是每個 x 出現的機率?
- :每個 z 產生出的 G(z) 若和 x 相同,則 = 1,否則 = 0
問題是,likelihood 太難計算,因為 G(z) 非常複雜,要求出 x 的機率會很困難。那麼在無法知道 likelihood 的情況下,如何調整 ,使得 G(z) 的分布會和 data 的分布最接近呢? 這就是 GAN 的貢獻。
Basic Idea of GAN
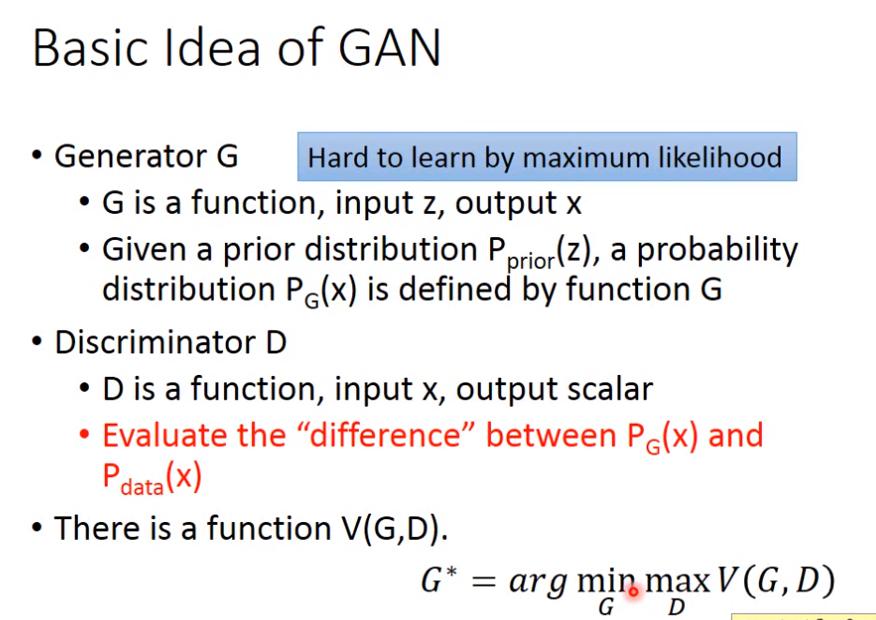
接下來解釋 的意義
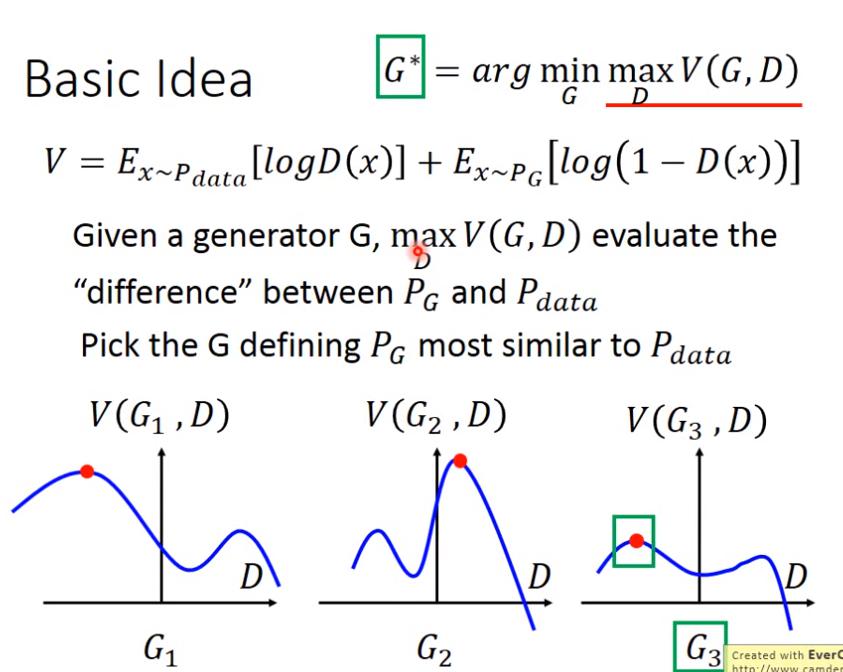 圖中橫軸是D,縱軸是V(G,D)
圖中橫軸是D,縱軸是V(G,D)
- 給定G和D,則 是座標中的紅點(曲線最高處)
- 而且若 V定義為 ,則 V(G,D)可以視為 Generator 和 data 之間的某種 divergence
- 我認為就是,D要最大化D所計算出的 generator 和 data 之間的 divergence,G要最小化 D所得到的 divergence
- 假設G只有圖中三種,則 會選擇 ,因為紅點是三者中最低的
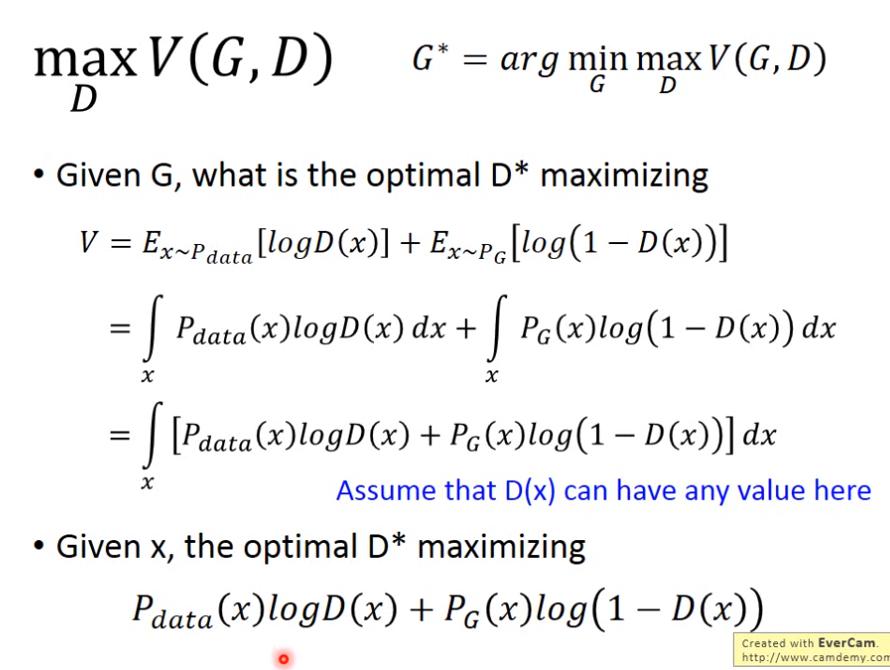 總之最好的 D* 想要最大化
也可以說是最大化
總之最好的 D* 想要最大化
也可以說是最大化
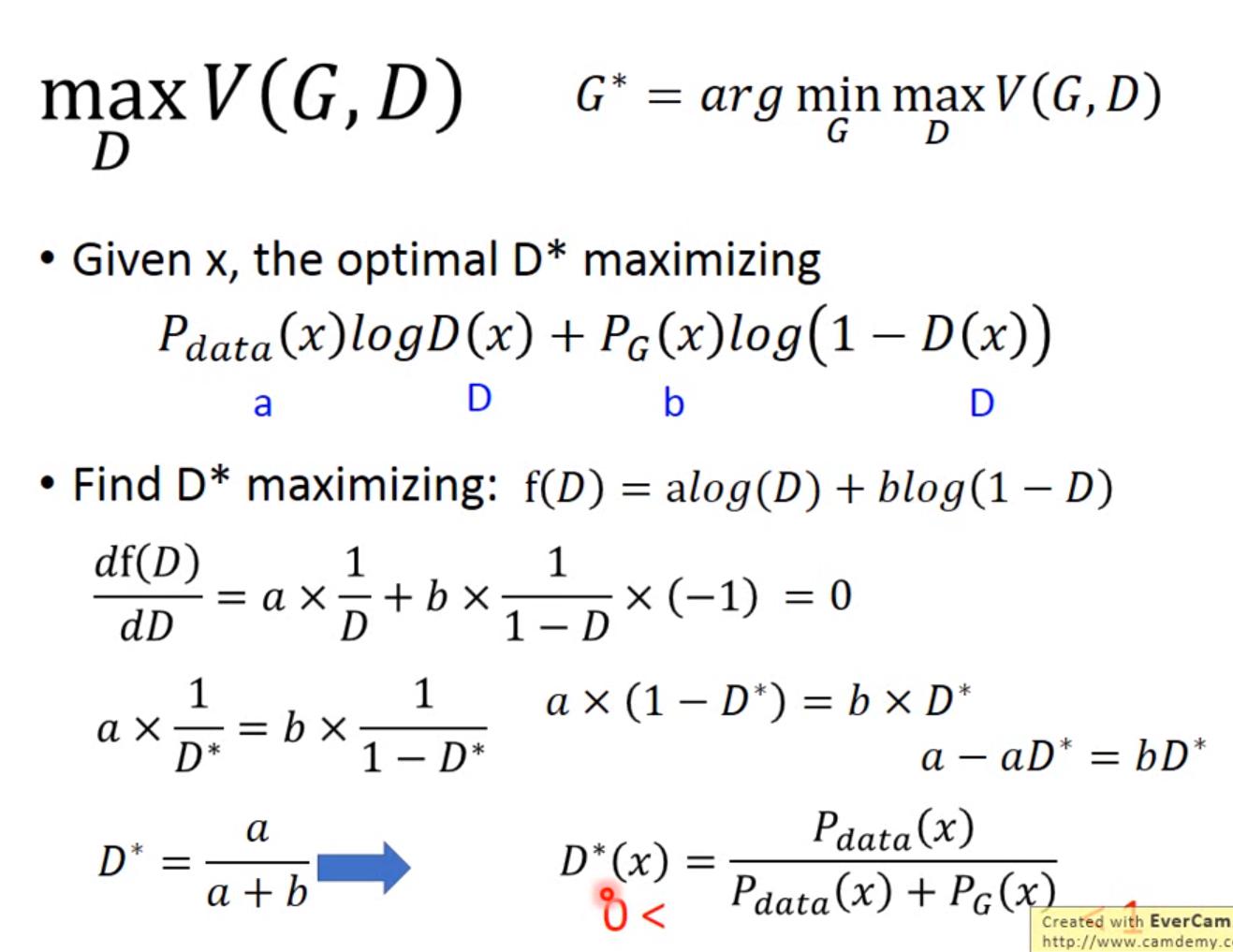 總之 最好的 D,給定一筆資料 x 時,
這個式子就是在衡量 G 和 data 的某種 difference,
接下來說明 為什麼是在衡量 G和data的 difference呢
總之 最好的 D,給定一筆資料 x 時,
這個式子就是在衡量 G 和 data 的某種 difference,
接下來說明 為什麼是在衡量 G和data的 difference呢
- 期望值可以視為積分
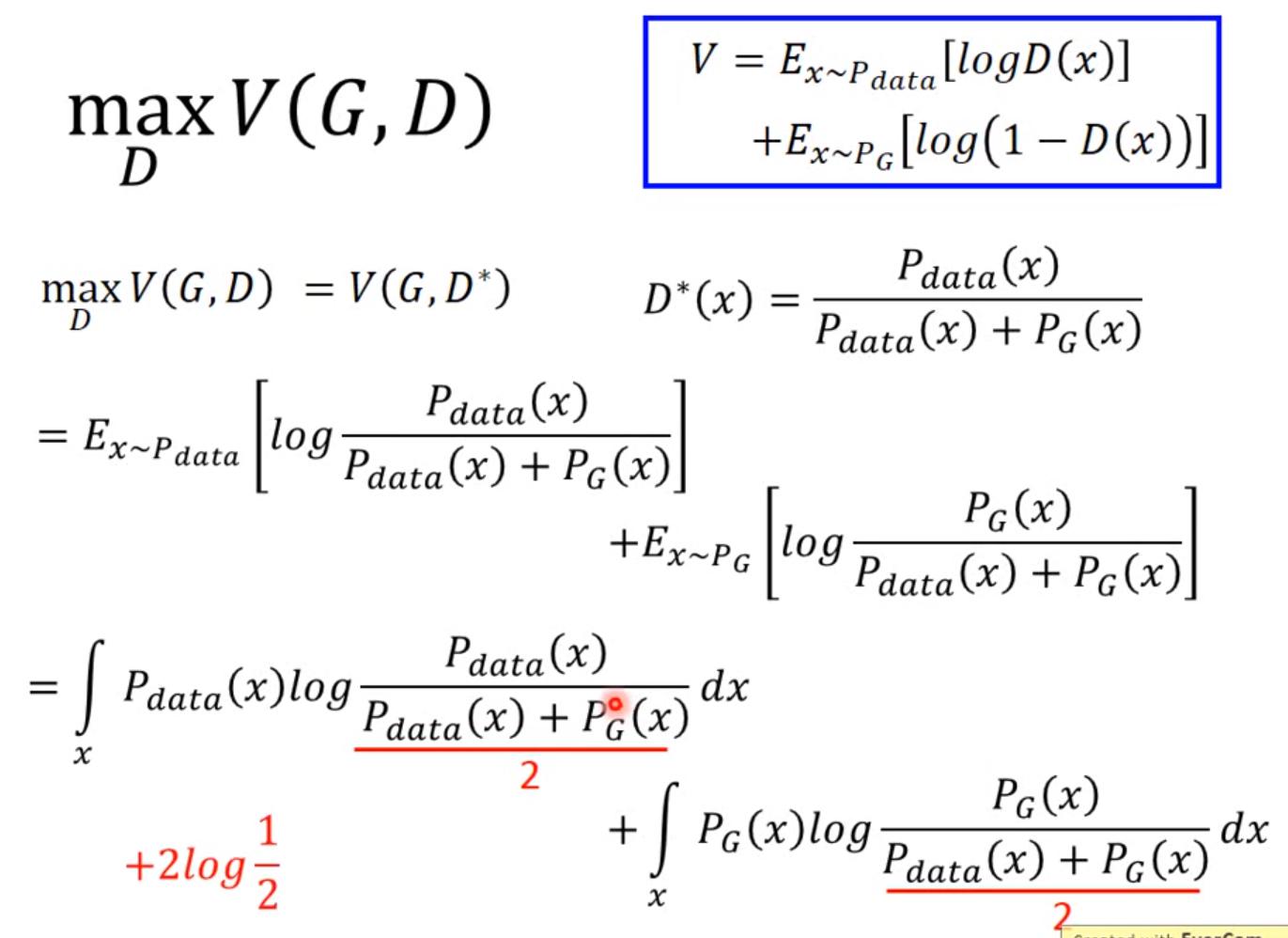
- 左式的 上下同乘 1/2,然後將上方的1/2提出來,會是
- 右式同理
於是公式就成了下面這樣
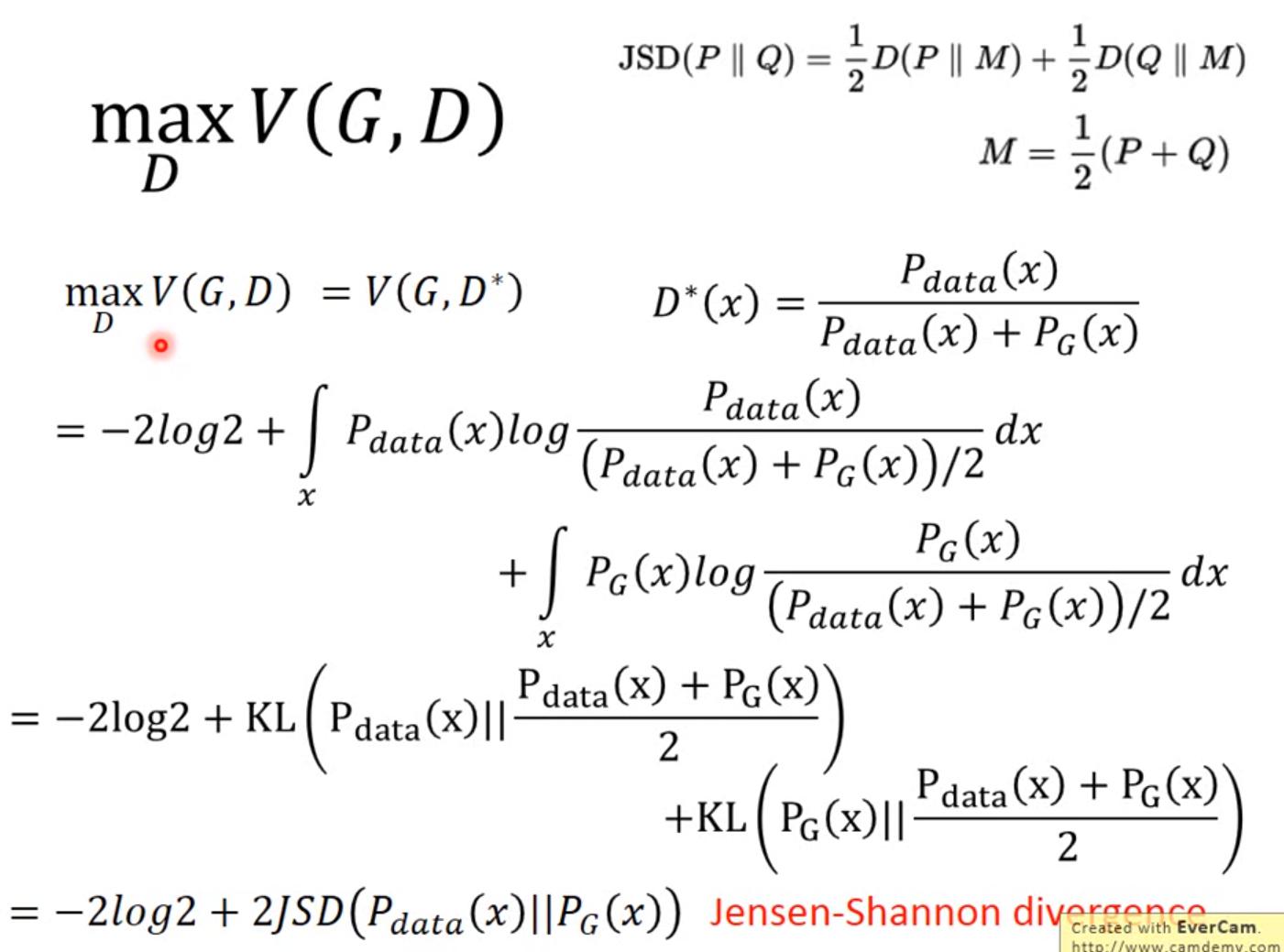
小結
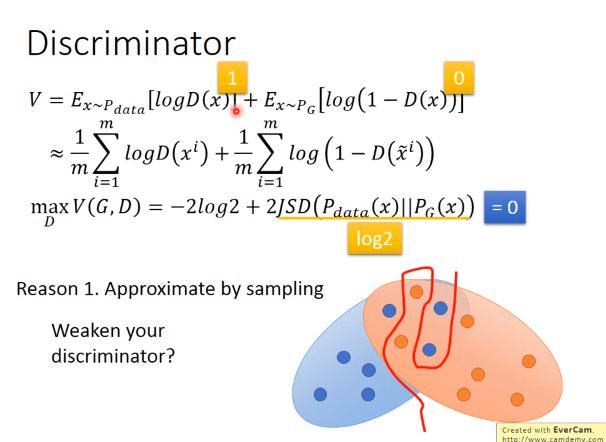
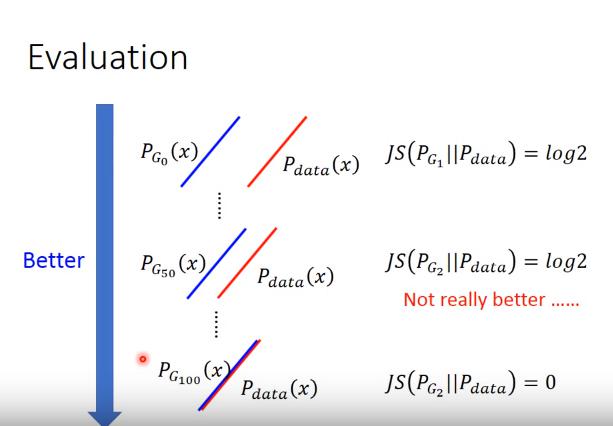
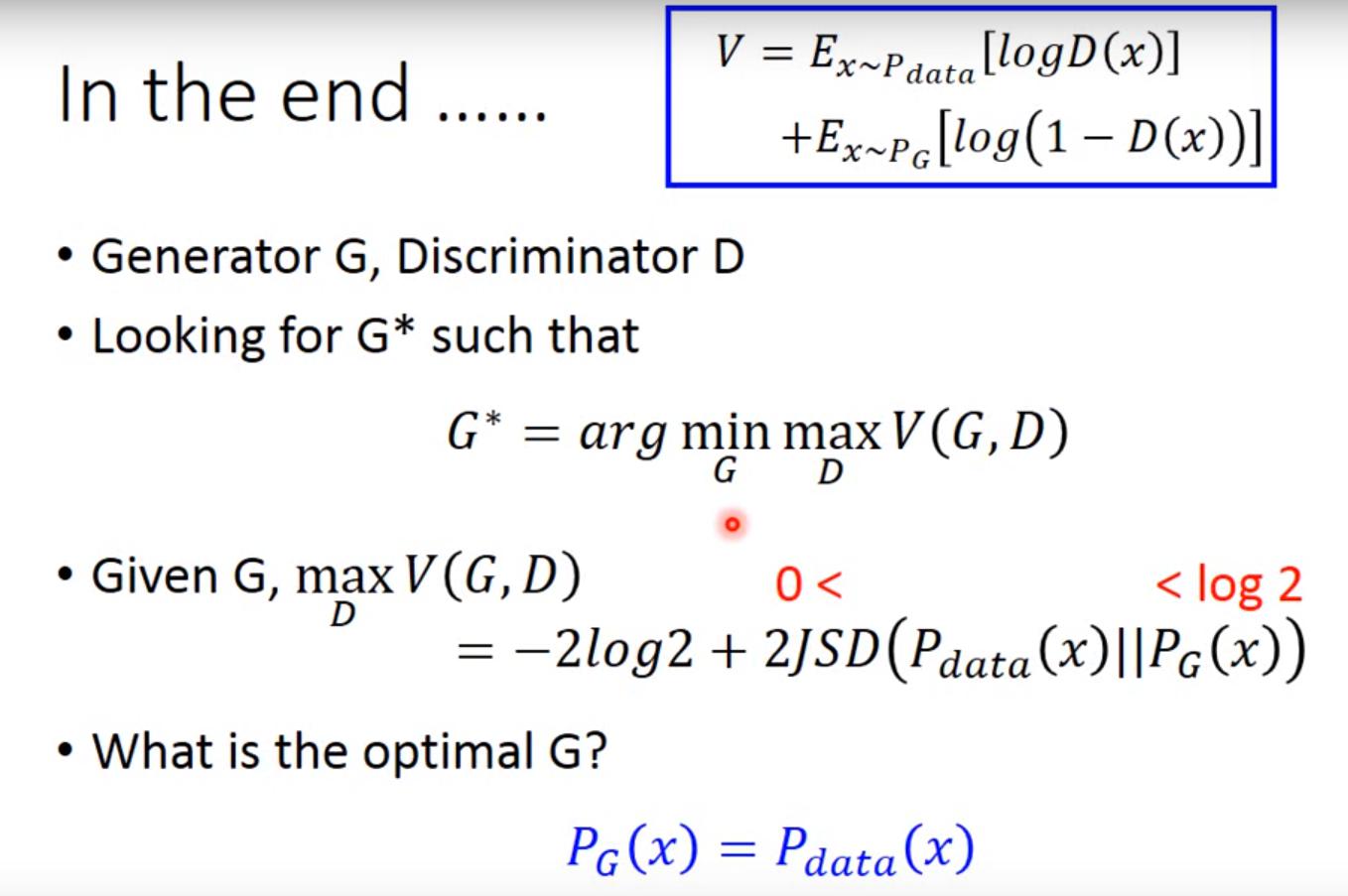 兩個 distribution 若完全沒有任何交集,則 JS divergence = log 2,若完全一模一樣,則JS divergence = 0,也就是說
最大值為0,最小值為 -2 log2
兩個 distribution 若完全沒有任何交集,則 JS divergence = log 2,若完全一模一樣,則JS divergence = 0,也就是說
最大值為0,最小值為 -2 log2
最好的 G 可以讓 最小,此時
Algorithm
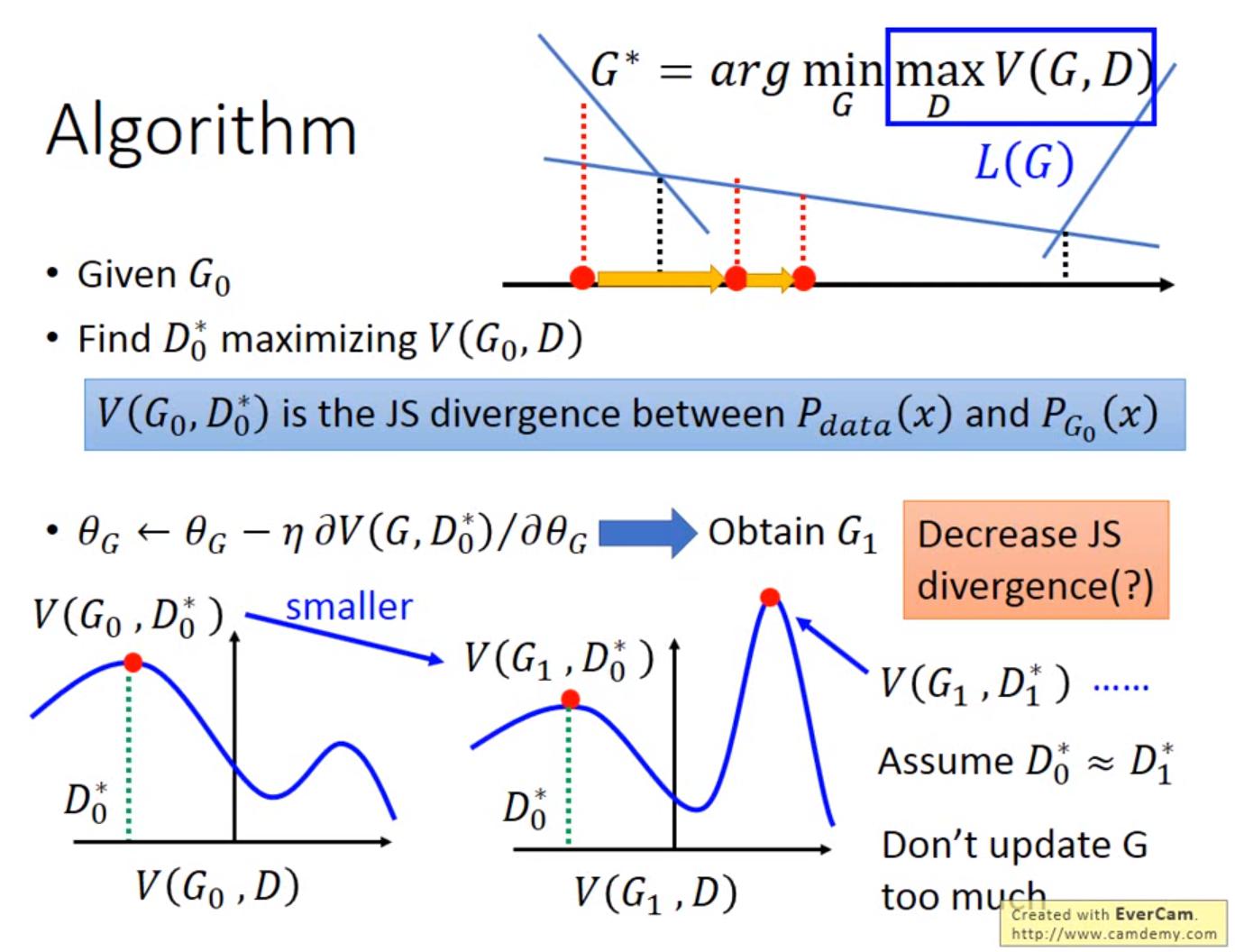
- G 不能 update 太多,因為這樣對該 Generator 來說 D* 會變很多,就不能保証新的 D 仍然是
定義 G的loss:
然後用 gradient descent 解 就出來了 耶結束了~~~(不是
In practice
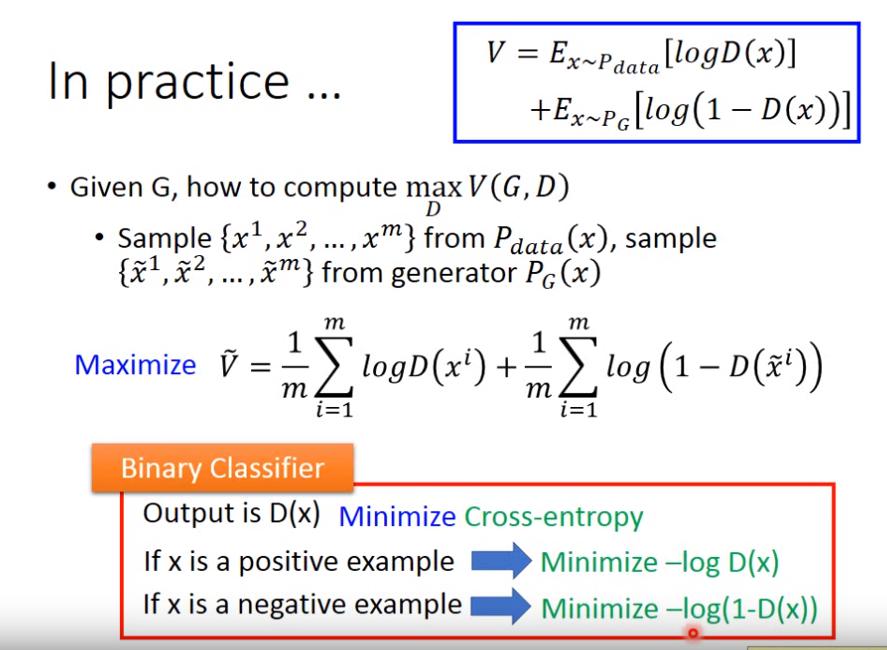
- 是用來逼近 V 的。 此外,
Maximize
也可以視為 Minimize
也就是 minimize cross entropy,亦即我們只要 train 一個 binary classifier 來分辨 G 和 data
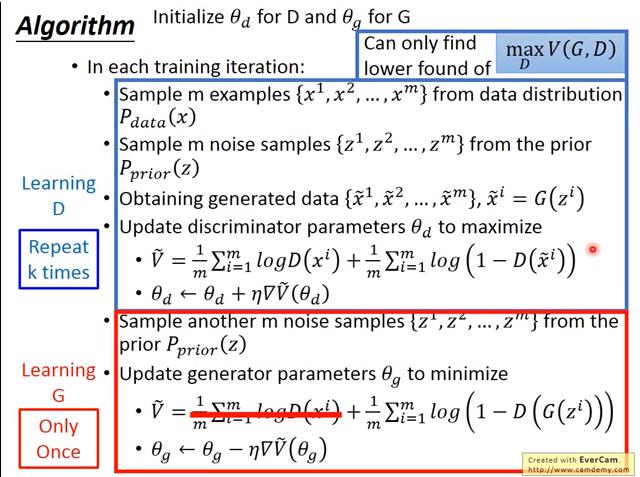
- 在訓練 D 時,要訓練多次,因為要找到 maximum
- 但 Ian Goodfellow 在 tutorial 說,他每個 iteration 訓練 D 也習慣只訓練一次
- 然而可能只找到 local optima,也就是說只能找到 的 lower bound
- 訓練 G 時,只訓練一次,因為之前說過,G不能差太多
- 訓練 G 時,要 minimize ,但是左邊那一項和G無關,因此可以省略
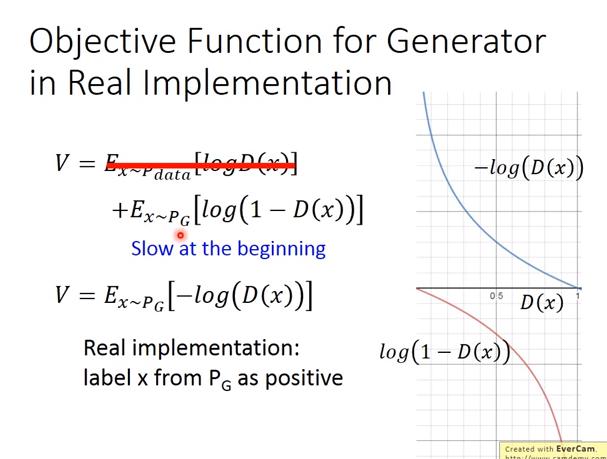 承前面所述,理論上,G 應該要 minimize
,然而當D(G(z)) 很小的時候(即 G產生的樣本騙不過D),此時梯度是很小的,因此訓練會變很慢。
承前面所述,理論上,G 應該要 minimize
,然而當D(G(z)) 很小的時候(即 G產生的樣本騙不過D),此時梯度是很小的,因此訓練會變很慢。
解法是,將 objective function 改成
- 一方面剛開始的訓練速度會變快,因梯度較大
- 另一方面,實作上的好處是,在這樣更新我們的 時,等同於把 所產生的資料,當作是 discriminative 的 positive 的 example (???為啥)
這邊很玄哪 之後再看一次
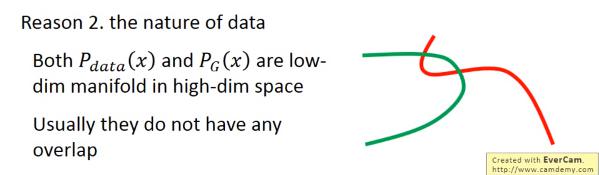
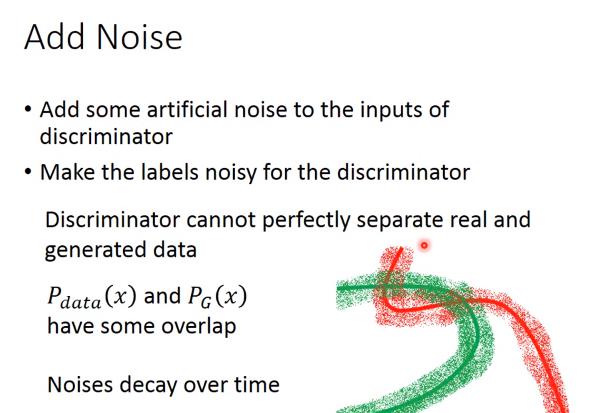
 因為D計算的是JSD,然而當兩個 distribution 沒有交集時,JSD都是 log2,因此G會沒有動力逼近 data distribution
因為D計算的是JSD,然而當兩個 distribution 沒有交集時,JSD都是 log2,因此G會沒有動力逼近 data distribution
一個解法是對 input data 或 label 增加 noise
Mode Collapse
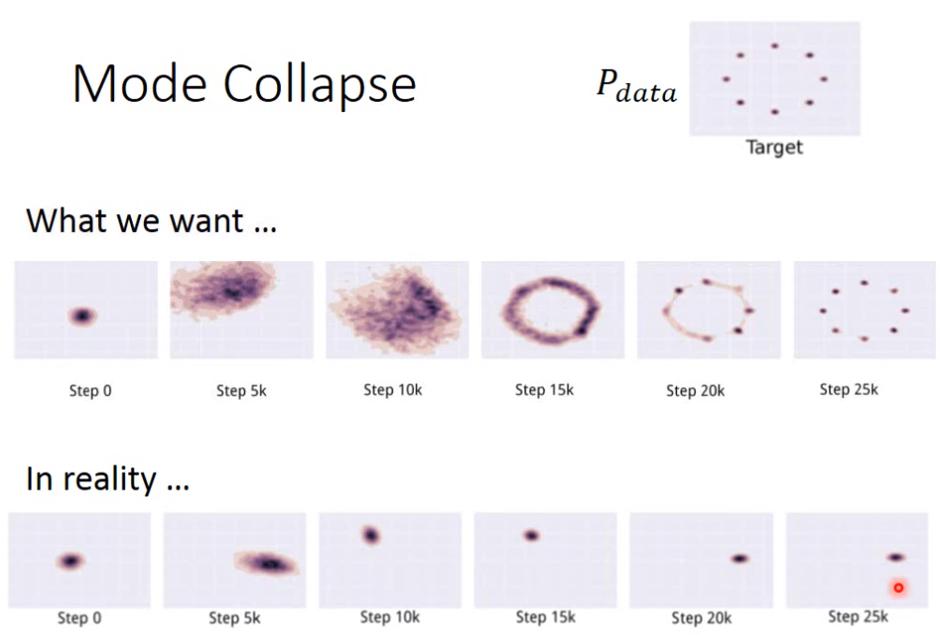
本來 Ian Goodfellow 以為發生 mode collapse 的原因是像下面這樣:
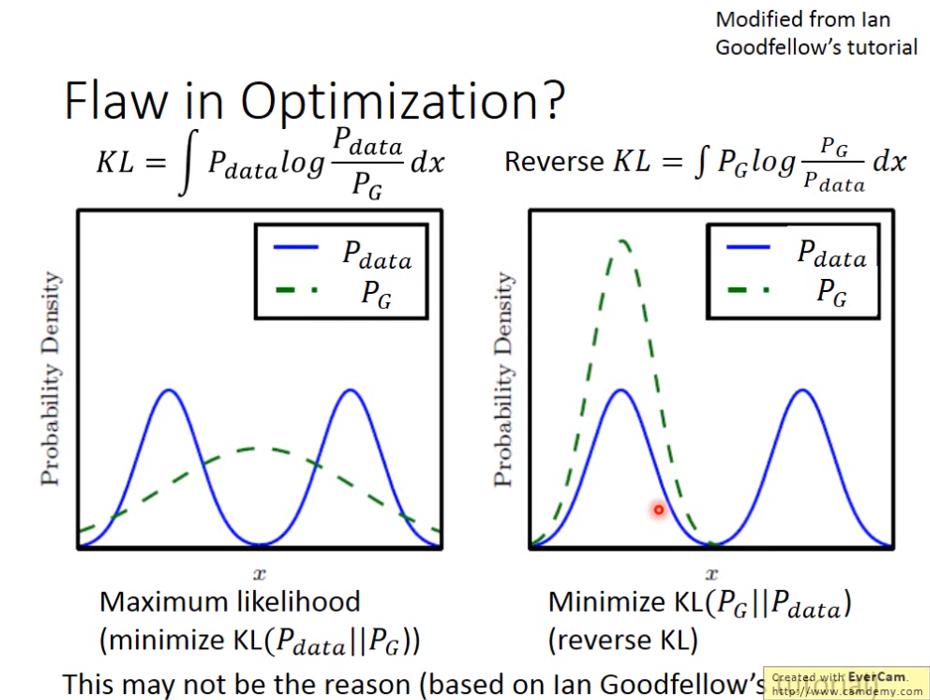 Ian Goodfellow 認為:如果今天 minimize 的是 KL divergence,則比較不容易發生 mode collapse,因為如果 可以產生 x 的地方, 不能產生 x 的話(即 ),則KL Divergence 會無窮大,因此在 minimize KL divergence 時,會將 盡量涵蓋住所有 的分布。
但是如果要 minimize 的是 Reverse KL divergence 的話,如果 能產生 x 但是 產生x的機率為0,則 reverse KL divergence 會是無窮大。那想 minimize 的話就會造成 固守他找到的distribution,不敢去拓展新的distribution。
Ian Goodfellow 認為:如果今天 minimize 的是 KL divergence,則比較不容易發生 mode collapse,因為如果 可以產生 x 的地方, 不能產生 x 的話(即 ),則KL Divergence 會無窮大,因此在 minimize KL divergence 時,會將 盡量涵蓋住所有 的分布。
但是如果要 minimize 的是 Reverse KL divergence 的話,如果 能產生 x 但是 產生x的機率為0,則 reverse KL divergence 會是無窮大。那想 minimize 的話就會造成 固守他找到的distribution,不敢去拓展新的distribution。
然而,我們如果直接 minimize KL divergence (藉由自己設定),仍然會出現 mode collapse 的問題。
So many GANs
Conditional GAN
例如我們想 input text , output image
幹嘛不直接用NN做 supervised learning 就好了呢?
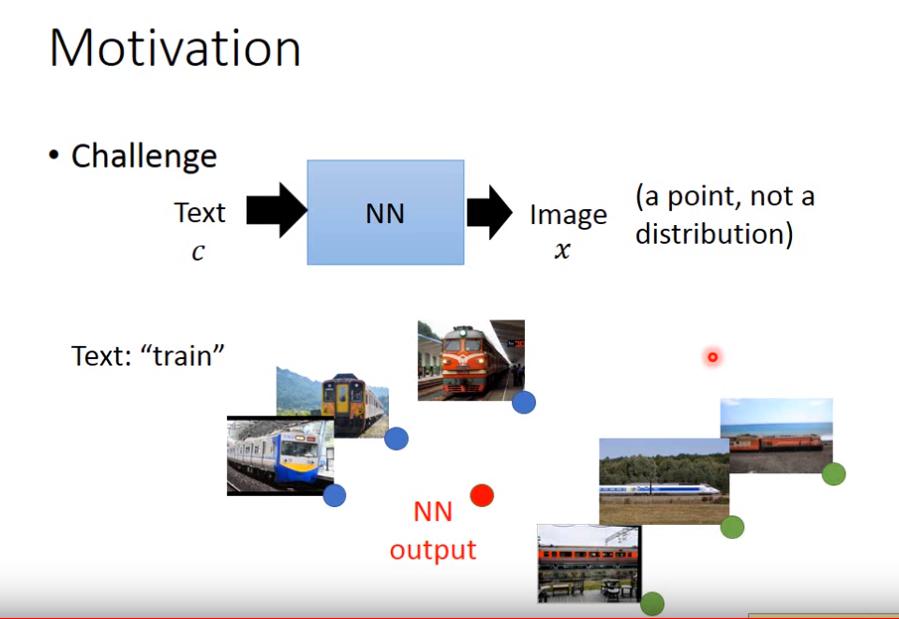 一般的 supervised learning 只能對 data point 建模,因此 input "train",他會 output 一張圖來 minimize 和所有火車圖片的誤差,那就會產生很模糊的圖片。
一般的 supervised learning 只能對 data point 建模,因此 input "train",他會 output 一張圖來 minimize 和所有火車圖片的誤差,那就會產生很模糊的圖片。
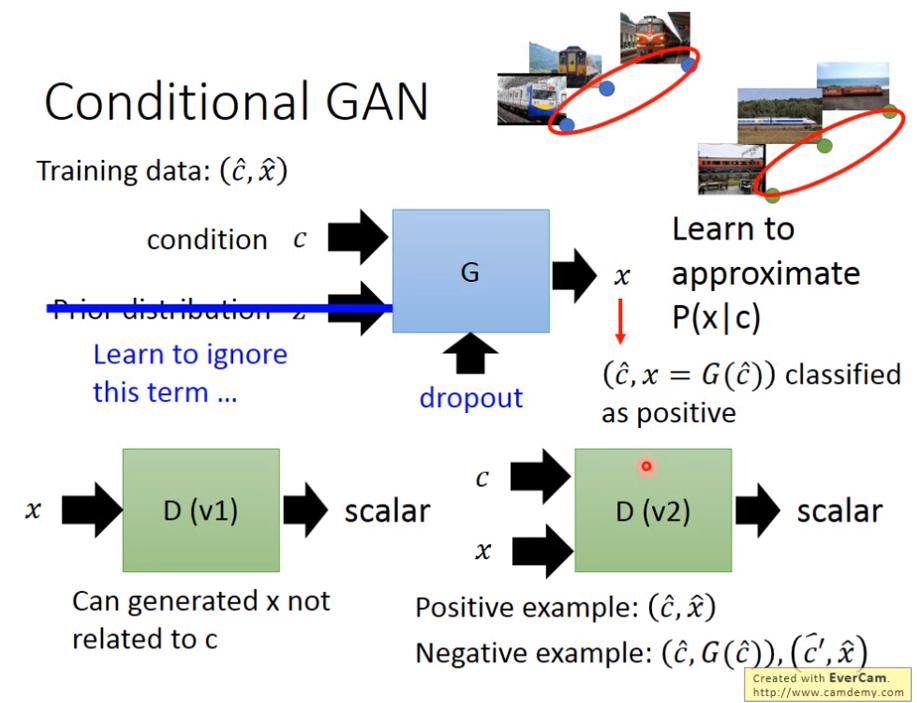
- GAN 和 NN 不一樣的是,GAN 可以學到資料的分布
- 然而做 conditional generation時,若 input c (類別) & z (noise),有時候GAN也會無視z,直接根據c產生data,要解決這個問題可以將架構改成,不 input z 了,直接做dropout,這樣也可以有 random distribution 的效果。
- conditional GAN 的 discriminator 是 輸入c和x,輸出結果,positive 的資料是:正確的c和x對應, negative 的資料是:正確的c和generated data對應,以及不正確的c和真實資料對應;而 generator 想做的事情是:希望 正確的c和generatored資料的對應可以騙過 discriminator。